
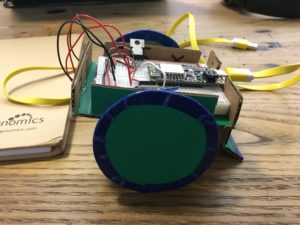
For the midterm project, I decided to make a messenger robot. Ideally, it would be able to take a note from one person and drive it to another person. So far, the prototype is made out of cardboard with two motors that are attached to wheels. The motors are connected to transistors and diodes and hooked up to 2 inputs pins on the HUZZAH. There’s a “brake” on the right side that stops the robot from falling down. I used the REST protocol to control the motors from the browser by creating a hotspot with my phone.
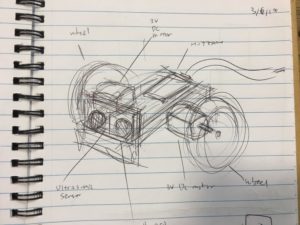
By the end of next week, I want to have something similar to the design below. I’d like to have an ultrasonic sensor that can output values to the user, saying something like “I’m 1.55 in away from my target!” If I have time, I’d want to add a servo motor on the top that would open and close a box that would hold the note in.
There are a few problems with the project so far. First, the motors go in opposite directions, which would technically make it spin, but I’d like it to go forward and back. Also, while the motors work and turn, the robot doesn’t actually move forward, which I’m not sure why is happening. Another problem is that I can only activate one motor at a time from the browser. By next week, I need to figure out these problems and possibly cut back on a few things. In terms of the design, I think the wheels afford rolling and moving, but so far there are no clear affordance or signifiers that users can place and take notes, which I’ll need to add.